Problem E: Earth Observation with a Mobile Robot Team
地球環境観測用の新型移動ロボットが開発された. このロボットは,地面の上を動き回りながら,高性能センサーを用いてさまざまな観測データを収集する. また,近距離無線通信機能も備えており,近くのロボットとの間で観測データを交換することもできる. 自身の観測データや他のロボットから受信したデータを記憶しておくための大容量記憶装置も装備されている.
図1は,3台のロボットA, B, Cの位置とその電波が到達する範囲を図示したものである. 各円の中心がロボットの位置で,円の内側には電波が到達する. この図では,ロボットAとロボットBが,お互いに通信可能な位置におり,ロボットAからロボットB(およびその逆向き)に観測データを伝えることができる. 一方,ロボットCは離れた場所にいるため,ロボットAやロボットBと通信することはできない. しかし,図2のようにロボットBが移動してロボットCに接近すれば,ロボットBとロボットCの間で通信が可能となる. このようにして,ロボットAの観測データをロボットBが中継してロボットCに伝えることができる. 別の例として,図3のような配置の場合には,一瞬で多くのロボットにデータが伝わる.
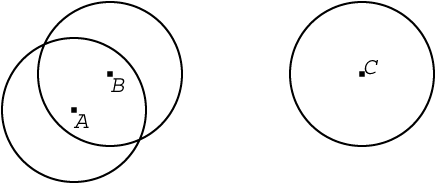 |
| 図1: 3台のロボットの初期配置 |
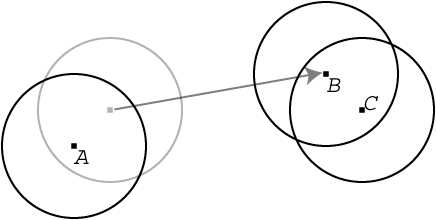 |
| 図2: ロボットの移動による中継 |
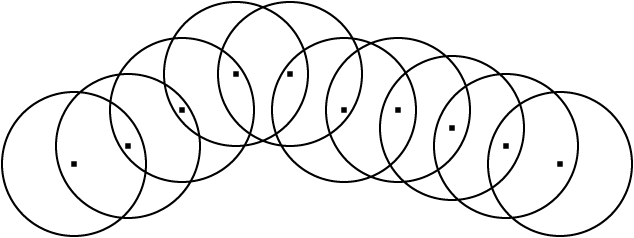 |
| 図3: 複数ロボット間での一瞬の中継 |
以上の例からわかるように,ロボットがうまく移動すれば,観測データを短時間で多くのロボットに伝えることができる. あなたの仕事は,与えられたロボットの移動経路から,ロボット間で観測データがどのように伝わっていくかシミュレートするプログラムを作成することである. データのサイズにかかわらず,通信に要する時間は無視できると仮定すること.
Input
入力は複数のデータセットから構成され,各データセットは以下のような形式で与えられる.
N T R
ロボット1のニックネームと移動経路
ロボット2のニックネームと移動経路
...
ロボットNのニックネームと移動経路
N, T, R は 1 <=N <= 100, 1 <= T <= 1000, 1 <= R <= 10 を満たす整数であり,それぞれ,ロボットの台数,シミュレーション時間の上限,ロボットの電波が届く最大距離を表す.
各ロボットのニックネームと移動経路は以下のような形式で与えられる.
nickname
t0 x0 y0
t1 vx1 vy1
t2 vx2 vy2
...
tk vxk vyk
nickname は1文字以上8文字以下の英小文字の列であり,2台以上のロボットが同じニックネームを持つことはない. 残りはすべて整数であり,以下の条件を満たす.
0 = t0 < t1 < ... < tk = T
-10 <= vx1, vy1, ..., vxk, vyk<= 10
ロボットは2次元平面上を移動する. (x0, y0) は時刻 0 のロボットの位置である. 時刻 ti-1 から ti の間(ただ し,0 < i <= k),x 軸方向と y 軸方向に,それぞれ,速度 vxi と vyi でロボットは移動する. したがって,ロボットの軌跡は,2次元平面上の折れ線になる. なお,この折れ線は,自分自身と重なったり交差したりするかもしれない.
任意のデータセットが以下の条件を満たすと仮定してよい.
- 時刻 0 には,どの2台のロボット間の距離もちょうど R にはならない.
- ロボットの位置の x, y 座標は,常に-500以上,500以下の範囲に収まっている.
- 2台のロボットが距離 R + 10-6 まで接近した場合には,その速度を保ったまま R - 10-6 以内まで接近する.
- 2台のロボットが距離 R - 10-6 まで離れた場合には,その速度を保ったまま R + 10-6 以遠まで離れる.
- 時刻 t にある2台のロボットがちょうど距離 R まで接近し,時刻 t' に2台のロボット(前述のものと1台または2台が同じでもよい)がちょうど R まで離れたとすると,t と t' は,少なくとも 10-6 単位時間離れている(すなわち,|t - t' | >= 10-6).
なお,複数のロボットが,同一時刻に同じ位置に存在するようなデータが入力 に含まれる可能性もある. そのような場合にも,ロボットは決められた速度で移動を続けることができる と仮定してプログラムを作成しなさい.
入力の終わりは 0 0 0 で表される.
Output
ロボット1は,時刻 0 に取得した観測データを,他のすべてのロボットに伝えようとする. 入力の各データセットに対して, その観測データが,時刻 T までに実際に伝達されるすべてのロボットのニックネームを,1行に一つずつ辞書式順序で出力しなさい. ニックネームの前後に空白のような余分な文字を含まないこと. ロボット1のニックネームは,必ず出力に含まれなければならないことに注意.
Sample Input
3 5 10 red 0 0 0 5 0 0 green 0 5 5 5 6 1 blue 0 40 5 5 0 0 3 10 5 atom 0 47 32 5 -10 -7 10 1 0 pluto 0 0 0 7 0 0 10 3 3 gesicht 0 25 7 5 -7 -2 10 -1 10 4 100 7 impulse 0 -500 0 100 10 1 freedom 0 -491 0 100 9 2 destiny 0 -472 0 100 7 4 strike 0 -482 0 100 8 3 0 0 0
Output for the Sample Input
blue green red atom gesicht pluto freedom impulse strike