Problem E: くるくる
2次元平面上の多角形の壁の内側を,時計回りに回転する棒を考える(図1参照).
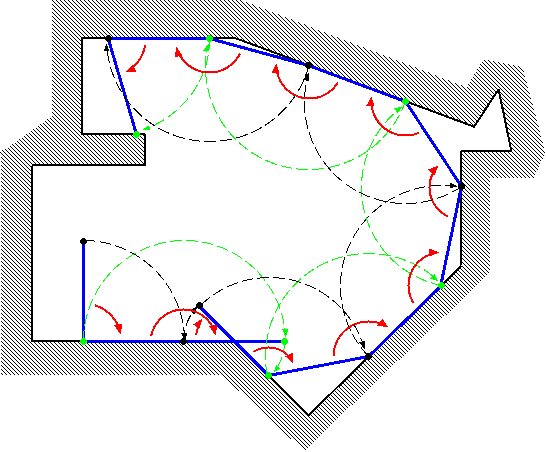
図1. 多角形の内側で回転する棒
最初は棒の片端(A端と呼ぶ)が(0,0),他端(B端と呼ぶ)が(0,L)にある. Lは棒の長さである.棒は最初はA端のみで壁に接している.
棒は壁に接している点を中心にして回転する. 新たな点が壁に接すると,回転の中心も変わる.
あなたの仕事は棒が与えられた回数Rだけ回転し終わった時点での A端の座標を計算することである.
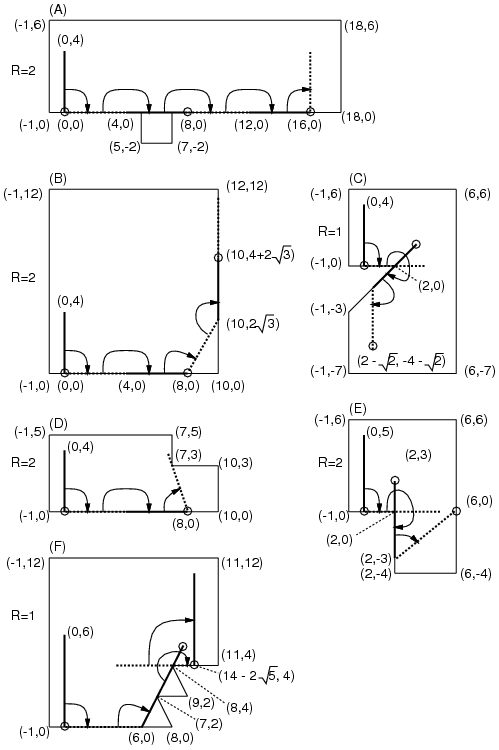
図2. 棒の回転のさまざまな例
図2にいくつかの例を示す.(D)と(E)では,棒は途中でつかえた (壁に接しているいずれの点を中心としても,それ以上時計回りに回転できない) 状態となる.そのような場合は, その (つかえた) 状態でのA端の座標を出力すること.
以下のことを前提としてよい:
棒の長さ L が ε (|ε| < 0.00001) だけ変化したとき, 結果の(x,y)座標が 0.0005 より大きく変化することはない.
Input
入力は複数のデータセットから成る.データセットの個数は100以下である. 入力の終わりは「0 0 0」で示される.
各データセットは以下の形式で与えられる:
L R N X1 Y1 X2 Y2 ... XN YN
Lは棒の長さである.棒は,途中ではつかえない場合, 2π×R ラジアン回転する.Nは多角形を構成する頂点の個数である.
多角形の頂点は,反時計回りの順番で並べられている. 多角形は単純であると仮定して構わない. すなわち,多角形の外周が自分自身と接触ないし交差することはない.
N, Xi, Yi は整数で, その他の値は十進小数である.それらの値の範囲は次の通り:
1.0 ≤ L ≤ 500.0, 1.0 ≤ R ≤ 10.0, 3 ≤ N ≤ 100, -1000 ≤ Xi ≤ 1000, -1000 ≤ Yi ≤ 1000,
X1 ≤ -1, Y1 = 0, X2 ≥ 1, Y2 = 0.
Output
それぞれのデータセットに対して,A端の最終状態におけるx座標とy座標を, スペース1個で区切った1行として出力すること. 出力する値は0.001以下の誤差を含んでいても構わない. また,値は小数点以下何桁表示しても構わない.
Sample Input
4.0 2.0 8 -1 0 5 0 5 -2 7 -2 7 0 18 0 18 6 -1 6 4.0 2.0 4 -1 0 10 0 10 12 -1 12 4.0 1.0 7 -1 0 2 0 -1 -3 -1 -8 6 -8 6 6 -1 6 4.0 2.0 6 -1 0 10 0 10 3 7 3 7 5 -1 5 5.0 2.0 6 -1 0 2 0 2 -4 6 -4 6 6 -1 6 6.0 1.0 8 -1 0 8 0 7 2 9 2 8 4 11 4 11 12 -1 12 0 0 0
Output for the Sample Input
16.0 0.0 9.999999999999998 7.4641016151377535 0.585786437626906 -5.414213562373095 8.0 0.0 6.0 0.0 9.52786404500042 4.0なお,上記のサンプル入力は図2の各ケースに対応している. また,図3にケース(C)の様子を示すアニメーションと分解写真を示す.
 |
 |
 |
 |
 |
 |
 |
 |
 |
図3. ケース(C)に対するアニメーションと分解写真